
Contenu
Outil de photogrammétrie UgCS pour les missions d'arpentage des terres UAV
Principaux avantages des UAV par rapport aux solutions d'enquête traditionnelles
Flux de travail de planification des vols dans UgCS
Première étape : Spécifiez le résultat souhaité
Deuxième étape : importer une carte précise et des données d'altitude dans UgCS (facultatif)
Troisième étape : Planifier la mission
Planification initiale
Route validation
Altitude type
Direction de la ligne d'arpentage
Types de virage
Overshoot
Méthode de contrôle de la caméra
NADIR/Photographie oblique
Exécution de l'action
Faire une double grille
Réduction du nombre de waypoints pendant le vol AGL
Vitesse
Point de décollage
Le point d'entrée de la grille d'arpentage
Point d'atterrissage
Quatrième étape : déployer des points de contrôle au sol (facultatif)
Étape cinq : pilotez votre mission
Étape six : traitement PPK et géolocalisation des images (facultatif)
Étape sept : traitement des données
Outil de photogrammétrie UgCS pour les missions d'arpentage des UAV
Les véhicules aériens sans pilote (UAV) ou les drones révolutionnent les services de cartographie et aident à générer plus rapidement des orthomoses, des nuages ponctuels et des modèles d'élévation précis. Les drones et les caméras évoluent étonnamment rapidement, cependant, la précision et la précision de la sortie des produits résultants dépendent fortement du logiciel de planification de vol.
Principaux avantages des UAV par rapport aux solutions d'enquête traditionnelles
Acquisition de données plus rapide. Avec les technologies cinématiques en temps réel (RTK) et cinématiques post-traitées (PPK), il n'est pas nécessaire de placer des points de contrôle au sol (GCP) pour de nombreuses applications.
L'équipement UAV est moins cher que l'équipement traditionnel d'arpentage
Les drones peuvent s'approcher dans des zones inaccessibles à pied ou en voiture
UgCS de SPH Engineering est une solution logicielle de planification de mission et de contrôle de vol UAV connue dans le monde entier. UgCS prend en charge presque toutes les plates-formes d'UAV, fournit des outils pratiques pour les levés linéaires et linéaires, et permet le contrôle direct des drones. UgCS assure la planification professionnelle des missions d'arpentage à l'aide de la technique de photogrammétrie.
Flux de travail de planification des vols dans UgCS
Spécifiez le résultat souhaité
Importer une carte précise et des données d'altitude dans UgCS (facultatif)
Planifiez la mission
Déployer des points de contrôle au sol (facultatif)
Pilotez la mission
Créer des géobalises d'image (facultatif)
Données de traitement
Première étape : Spécifiez le résultat souhaité
Définissez d'abord les paramètres d'entrée :
GSD requis (distance d'échantillonnage au sol)
Limites de la zone d'enquête
Rés chevauchement avant et latéral requis
GSD est la résolution spatiale d'un capteur. Il s'agit de la distance mesurée en centimètres entre les centres de deux pixels voisins dans l'image sur la surface au sol. Le GSD et les limites de la zone sont généralement définis par la production souhaitée du client (par exemple, l'échelle et la résolution de la carte numérique). Le GSD affecte le niveau de détail des données acquises. Vous trouverez ci-dessous des exemples de ce à quoi une voiture peut ressembler sur les photos avec différents GSD Tableau 1
GSD affectant le niveau de détalisation des données acquises50 cm/pix15 cm/pix3 cm/pix
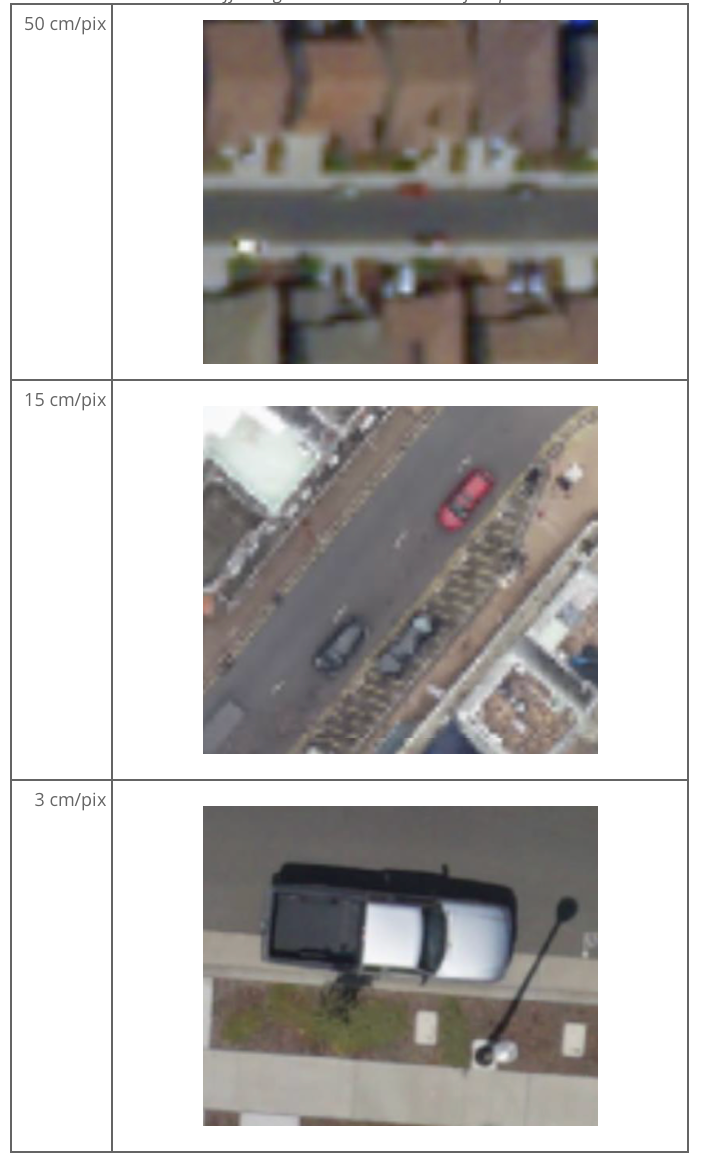
Les pilotes peuvent soit tracer manuellement les limites d'arpentage dans UgCS, soit les importer à partir d'un KML. Le chevauchement doit être choisi en fonction des conditions spécifiques de la zone d'enquête et des exigences du logiciel de traitement des données par drone. Par défaut, le chevauchement latéral de 60 % et de 30 % de côté sont les paramètres minimum recommandés. Le chevauchement peut être augmenté pour les zones avec des surfaces verticales ou des surfaces visuelles très uniformes (dessert, neige). Très souvent, les débutants en photogrammétrie aérienne sont enthousiastes à l'idée de faire une carte numérique avec une résolution extrêmement élevée (1-2 cm/pixel) et utilisent un très petit GSD pour la planification de la mission. C'est une très mauvaise pratique, car un petit GSD signifie un temps de vol plus long, des centaines de photos pour chaque acre, des dizaines d'heures de traitement et des fichiers de sortie lourds. Le GSD doit être réglé en fonction des paramètres de la carte numérique souhaités. D'autres limitations peuvent également s'appliquer. Par exemple, un GSD de 10 cm/pixel est nécessaire, mais un drone va transporter un appareil photo Sony A7 III avec un capteur de 24 MP. Pour répondre à un tel GSD, le drone doit voler à 510 mètres au-dessus du sol. Le problème est que dans la plupart des pays, l'altitude maximale autorisée des UAV (sans autorisation spéciale) est limitée à 120 m/400 ft AGL (au-dessus du niveau du sol). Compte tenu de l'altitude maximale autorisée, le GSD le plus élevé possible, dans ce cas, ne pourrait être que de 2,3 cm.
Deuxième étape : importer une carte précise et des données d'altitude dans UgCS (facultatif)
Par défaut, UgCS donne accès à une variété de services de tuiles en ligne et de données d'altitude SRTM. Les pilotes peuvent également avoir des données orthomédiques et/ou d'altitude provenant d'enquêtes ou de fournisseurs de données satellitaires. Si c'est le cas, les pilotes peuvent télécharger ces données dans UgCS et effectuer une planification de vol plus précise. Ouvrez les calques Map pour télécharger une carte ou des données d'élévation (Figure 1).

Figure 1 Ouvrez les couches de carte pour télécharger une carte ou des données d'élévation dans UgCS
Ouvrez les onglets Carte et Élévation pour ajouter de nouvelles sources et télécharger des données orthomosaïques (GeoTiff) ou d'élévation(Figure 2).

Figure 2 Ajout de nouvelles sources et téléchargement d'orthomosaïques (GeoTiff) ou de données d'élévation dans UgCS
Video 1 Importation d'une carte précise et de données d'altitude dans UgCS
Initial planning
TLa première étape consiste à spécifier votre zone d'arpentage par drone à l'aide de l'outil Photogrammétrie. Pour ce faire, mettez des repères visuels sur une carte sous-jacente ou entrez les coordonnées exactes des bords. La zone d'arpentage résultante est marquée de limites jaunes (Figure 3).

Figure 3 Définition de la zone d'arpentage à l'aide de l'outil de photogrammétrie UgCS Une autre option consiste à importer des limites de zone à partir de KML : ajoutez une nouvelle route, sélectionnez "Importer à partir du fichier", puis sélectionnez en utilisant la photogrammétrie pour tous les objets LineRing dans le KML file (Figure 4).
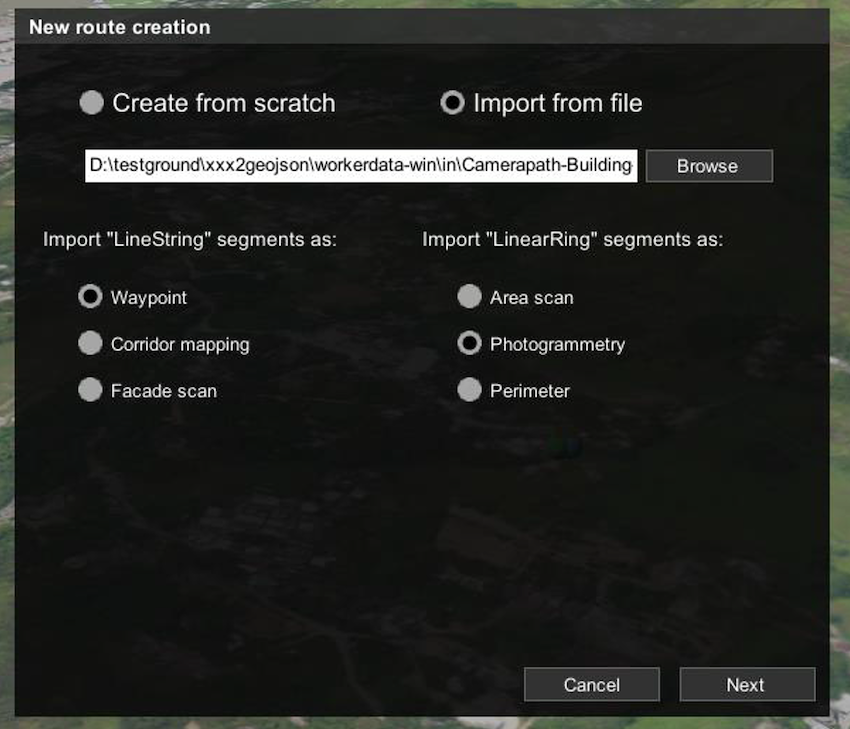
Figure 4 Définition de la zone d'arpentage par drone en important les limites de zone à partir de KML Ensuite, définissez le GSD et le chevauchement pour l'appareil photo dans la photogrammétrie tool's settings window (Figure 5).
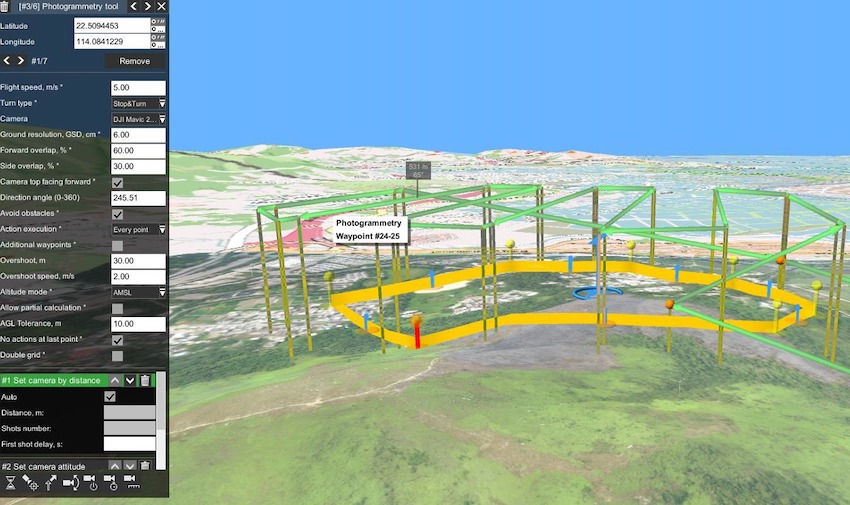
Figure 5 Réglage du chevauchement et de la distance d'échantillonnage au sol (GSD) de la caméra Pour prendre des photos, définissez l'action de contrôle de l'appareil photo dans la fenêtre des paramètres de l'outil Photogrammétrie. Dans l'exemple (Figure 5), Définir la caméra par action de déclenchement de distance avec les valeurs par défaut est utilisé. À ce stade, la planification initiale de l'itinéraire est terminée. UgCS calculera automatiquement l'itinéraire de photogrammétrie. Cependant, l'itinéraire de photogrammétrie calculé automatiquement est souvent non optimal et parfois même dangereux pour le drone ou les environs. Par conséquent, passez à l'étape « Validation de l'itinéraire ».
Route validation
UgCS génère une trajectoire qui sera téléchargée sur le drone. Les pilotes peuvent le voir comme une polyligne 3D verte et vérifier d'autres paramètres du plan de vol calculé. La première partie de ces informations se trouve dans la fenêtre du profil d'élévation. Pour ouvrir la fenêtre d'élévation (si elle est invisible à l'écran), cliquez sur l'icône Paramètres sur la carte Itinéraire (coin inférieur droit, voir la figure 6) et sélectionnez Afficher l'élévation dans le menu déroulant :

Figure 6 Accès à la fenêtre Élévation dans les paramètres Paramètres de la carte Route La fenêtre du profil d'altitude affichera la longueur estimée de l'itinéraire, la durée, le nombre de points de route et l'altitude min/max. (Figure 7).
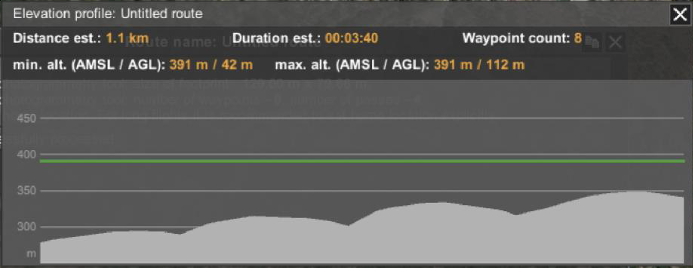
Figure 7 Valeurs d'itinéraire dans la fenêtre du profil d'élévation Pour obtenir d'autres valeurs calculées (Figure 8), Ouvrez le journal d'itinéraire en cliquant sur l'indicateur d'état de l'itinéraire - la coche verte (coin supérieur droit, voir la figure 6) de la carte d'itinéraire.

Figure 8 Carte d'itinéraire et indicateur d'état, journal d'itinéraire Vous pouvez utiliser les paramètres d'itinéraire pour optimiser les performances et améliorer l'efficacité et la sécurité.
Altitude type
L'outil de photogrammétrie UgCS a la possibilité de définir la méthode de traçage d'itinéraire en fonction de l'altitude - avec une altitude constante au-dessus du sol (AGL) ou au-dessus du niveau moyen de la mer (AMSL). Veuillez vous référer aux exigences de votre logiciel de traitement des données UAV pour voir la méthode de suivi de l'altitude recommandée. L'expérience de l'équipe UgCS montre que le choix du type d'altitude dépend de la production souhaitée. Pour la carte orthophoto (format de sortie d'arpentage aérien standard), il est préférable de choisir AGL pour assurer une GSD constante pour l'ensemble de la carte. Pour la reconstruction DEM ou 3D, utilisez AMSL pour fournir au logiciel de traitement des données plus de données afin de déterminer correctement l'altitude du sol par des photos et d'obtenir une sortie de meilleure qualité.

Figure 9 Profil d'altitude avec altitude constante au-dessus du niveau moyen de la mer (AMSL)
Dans ce cas, UgCS calculera l'altitude de vol en fonction du point le plus bas de la zone d'arpentage (figure 9). Si AGL est sélectionné dans les paramètres de l'outil Photogrammétrie, UgCS calculera l'altitude pour chaque point de cheminement, mais dans ce cas, le suivi du terrain sera rugueux si aucun « point de cheminement supplémentaire » n'est ajouté (Figure 10).

Figure 10 Profil d'élévation avec AGL sans points de cheminement supplémentaires
Par conséquent, si AGL est utilisé, ajoutez des drapeaux « waypoints supplémentaires », et UgCS calculera un plan de vol en fonction du profil d'altitude (figure 11).
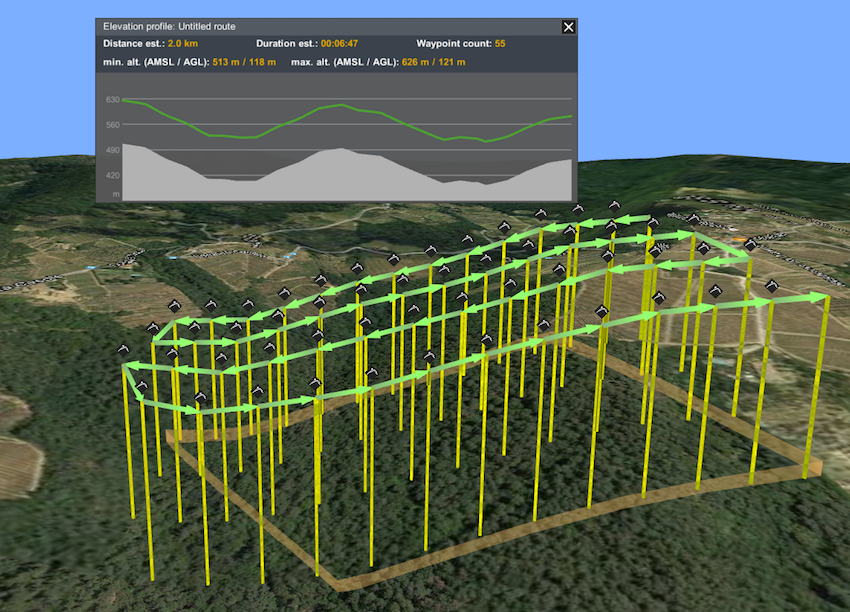
Figure 11 Profil d'altitude (AGL) et points de cheminement supplémentaires
Direction de la ligne d'arpentage
Par défaut, UgCS générera des passes transférées orientées le long du côté le plus long de la zone. Pour modifier ce paramètre par défaut, les pilotes peuvent modifier le champ d'angle de direction de l'outil Photogrammétrie et utiliser une flèche rotative sur le polygone lui-même pour ajuster le même paramètre (Figure 12, 13).

Figure 12 Angle de direction = 246 degrés du nord
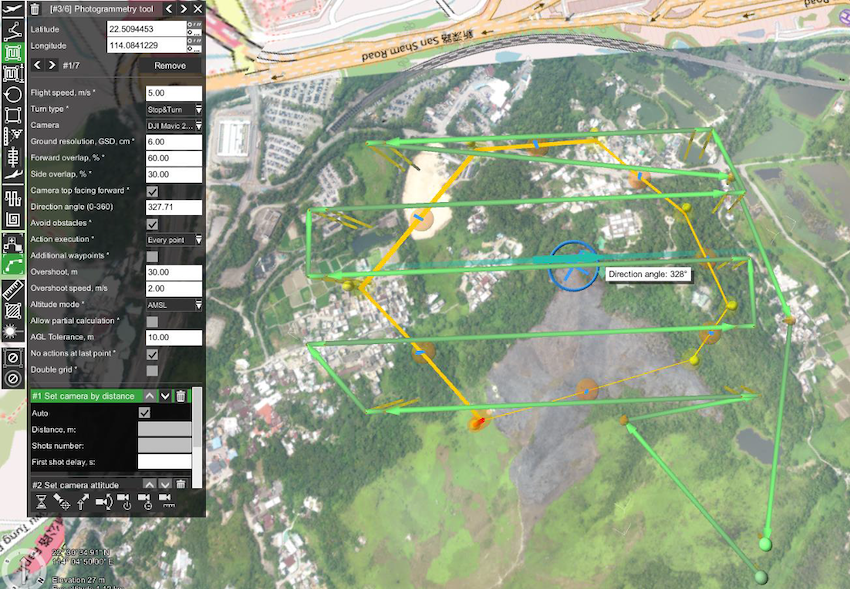
Figure 13 Changer l'angle d'une ligne d'arpentage pour rendre la ligne parallèle à la limite la plus longue. Nouvel angle de direction = 328 degrés du nord
Types de rotation
La plupart des pilotes automatiques ou des drones multirotor prennent en charge différents types de virage dans les waypoints. Les drones DJI, qui sont l'un des plus populaires, ont deux types de tours (Figure 14) :
Arrêter et faire marche : le drone vole au point fixe avec précision, reste à ce point fixe, puis vole jusqu'au point fixe suivant.
Turn de banque adaptatif : les performances sont similaires au mode Tour de banque (figure 14), mais la vraie routine de vol sera plus précise.
Adaptive Bank Turn doit être utilisé avec prudence car les drones peuvent manquer des points de cheminement et aucun déclenchement de la caméra ne sera initié.

Figure 14 Trajectoires de drones DJI typiques pour les types Bank Turn et Adaptive Bank Turn
Pour raccourcir le temps de vol (par rapport à l'arrêt et au virage), utilisez le virage bancaire adaptatif. La combinaison des tours de banque adaptatives avec Overshoot (voir la section Overshoot) est recommandée pour la zone de photogrammétrie.
Overshoot
Initialement, overshoot a été conçu pour que les drones à voilure fixe (avion) aient suffisamment d'espace pour les manœuvres de demi-tour. Le dépassement peut être défini dans l'outil Photogrammétrie pour ajouter des segments supplémentaires aux deux extrémités de chaque ligne de sondage.

Figure 15 Ajout de 40 m de dépassement aux deux extrémités de chaque ligne d'arpentage
La figure 15 montre que UgCS a ajouté des segments de 40 m aux deux extrémités de chaque ligne d'arpentage (par rapport à la figure 13). L'ajout du dépassement pour les drones d'hélicoptère est utile dans deux situations :
Lorsque des virages bancaires adaptatifs sont utilisés (ou une méthode similaire pour les drones non-DJI), l'ajout du dépassement augmentera le risque que le drone entre avec précision dans la ligne d'arpentage et que l'action de contrôle de la caméra soit déclenchée. L'équipe UgCS recommande de définir le dépassement pour qu'il soit approximativement égal à la distance entre les lignes de levé parallèles.
Lorsque le type Stop and Turn est combiné avec le déclenchement de l'appareil photo dans les points de cheminement, il y a un risque qu'avant de prendre la prise de vue, le drone commence à tourner vers le point de chemin suivant, ramenant ainsi des photos mal orientées ou floues (figure 16). Pour éviter cela, définissez un dépassement plus court, par exemple, 5 m. Ne fixez pas une valeur trop courte (< 3 m) car certains drones peuvent ignorer les waypoints qui sont trop proches.

Figure 16 Exemple d'une image floue prise par un drone en rotation vers le point de passage suivant
Méthode de contrôle de la caméra
UgCS prend en charge trois actions de contrôle de la caméra :
“Réglez le mode caméra » pour réaliser la prise de vue exactement à un point spécifié
« Réglez l'appareil photo à l'heure » pour prendre des photos toutes les N secondes
« Réglez la caméra par distance » pour prendre des photos tous les N mètres
Voici quelques avantages et inconvénients des trois méthodes :

NADIR/Photographie oblique
Dans la plupart des cas, une caméra d'arpentage en photogrammétrie doit regarder droit vers le bas. Veuillez vous assurer que l'action d'attitude "Définir la caméra" avec un angle d'inclinaison de 90 degrés est sélectionnée pour le segment de photogrammétrie (Figure 17).

Figure 17 Réglage de l'attitude et de la position de l'appareil photo avec un angle d'inclinaison de 90 degrés Pour les zones urbaines avec des surfaces verticales, nous recommandons de faire un autre passage sur les zones avec la caméra inclinée à 45 degrés (figure 18). Cela permettra de capturer les murs et d'augmenter la qualité du nuage de points.

Figure 18 Réglage de l'attitude et de la position de la caméra avec un angle d'inclinaison de 45 degrés Comme décrit ci-dessus, ce waypoint doit être défini comme type Stop&Turn, sinon, le drone peut sauter cette action. Pour régler la caméra sur une position horizontale, sélectionnez le dernier point de chemin d'arpentage, cliquez sur Définir l'attitude/le zoom de la caméra et entrez "0" dans le champ "Tilt".
Exécution de l'action
L'outil de photogrammétrie a un paramètre avancé d'exécution d'action avec trois valeurs possibles :
Chaque point
Au début
Transferts avant
Ce paramètre définit comment et où les actions de caméra spécifiées pour l'outil de photogrammétrie seront exécutées. L'option la plus utile pour les missions de photogrammétrie/enquête est de définir des passes Forward : un drone ne prendra des photos que sur les lignes d'arpentage et ne prendra pas de photos excédentaires sur des lignes perpendiculaires. Zones d'enquête complexes Parfois, une mission de photogrammétrie/enquête doit être planifiée pour les zones irrégulières. Par exemple, si deux champs connectés en forme de « T » sont marqués comme une seule zone de photogrammétrie, l'itinéraire ne sera pas optimal, quelle que soit la direction de la ligne de relevé (Figure 19).

Figure 19 Zone d'enquête complexe avant optimisation
La fonctionnalité UgCS permet de combiner n'importe quel nombre de zones de photogrammétrie en un seul itinéraire et d'éviter de diviser la zone en itinéraires distincts. Les lignes de sondage pour chaque zone peuvent être optimisées individuellement (figure 20). La fonctionnalité UgCS permet de combiner n'importe quel nombre de zones de photogrammétrie en un seul itinéraire et d'éviter de diviser la zone en itinéraires distincts. Les lignes de sondage pour chaque zone peuvent être optimisées individuellement (figure 20).

Figure 20 Pass de vol d'arpentage optimisés pour chaque partie d'une zone de photogrammétrie complexe
Faire une double grille
La double grille est un moyen très efficace d'augmenter la qualité des nuages ponctuels dans les zones urbaines et les zones à élévation complexe ou à forte végétation. Utilisez l'option Double grille dans les paramètres de photogrammétrie (Figure 21).

Figure 21 Option de double grille activée dans les paramètres de photogrammétrie
Réduction du nombre de waypoints pendant le vol AGL
Voler à une altitude constante au-dessus du sol entraînera des points de passage excessifs. Le pilote automatique peut prendre en charge une quantité limitée de waypoints, de sorte qu'un pilote peut vouloir réduire ce nombre. La réduction du niveau de trajectoire des détails entraînera également des mouvements plus fluides des drones (comparer la figure 22 et la figure 23). Le paramètre de tolérance AGL de l'enquête photogrammétrique peut être utilisé pour le mode d'altitude AGL. La tolérance AGL spécifie le corridor vertical. Tant que la trajectoire se situe dans les limites supérieure et inférieure de ce corridor, aucun point supplémentaire n'est généré par UgCS.

Figure 22 AGL Tolerance = 2 m

Figure 23 AGL Tolerance = 10 m
Vitesse
En général, plus la vitesse de vol est élevée, plus le temps de vol est court. Mais la haute vitesse combinée à une grande exposition de l'appareil photo peut entraîner des images floues. Dans la plupart des cas, 10 m/s est le meilleur choix.
Point de décollage
Il est important de vérifier la zone de décollage sur le site avant de prendre l'avion pour toute mission ! Pour mieux expliquer la meilleure pratique de la fixation d'un point de décollage, passons d'abord en revue un exemple de la façon dont cela ne devrait pas être fait. Le point de décollage dans l'exemple de mission (figure 24) est marqué d'une icône d'avion, et un pilote de drone téléchargera l'itinéraire au sol en définissant une mission automatique pour le décollage automatique.

Figure 24 Exemple de point de décollage
La plupart des drones en mode de décollage automatique monteraient à une basse altitude d'environ 3 à 10 mètres, puis voleraient tout droit vers le premier point de passage. D'autres drones voleraient vers le premier point de passage directement depuis le sol. Sur l'exemple de carte (figure 24), certains arbres entre le point de décollage et le premier point d'accès peuvent être remarqués. Dans cet exemple, le drone n'atteindra probablement pas une altitude sûre et frappera les arbres. Non seulement l'environnement peut affecter la planification du décollage. Les fabricants de drones peuvent modifier le comportement d'élévation dans le micrologiciel du drone : par conséquent, il est recommandé de vérifier le mode de décollage automatique du drone après les mises à jour du micrologiciel. N'oubliez pas que la plupart des petits UAV utilisent l'altitude relative pour la planification de la mission. Le comptage de l'altitude basé sur le premier point d'approche est la deuxième raison pour laquelle le point de décollage réel devrait être proche du premier point d'accès et sur le même niveau du terrain. L'équipe UgCS recommande de placer le premier point de passage aussi près que possible du point de décollage réel et de spécifier l'altitude de décollage en toute sécurité (~30 m seront au-dessus de tous les arbres dans la plupart des situations, voir la figure 25). C'est la seule façon de garantir un décollage en toute sécurité pour toute mission et de se protéger contre tout comportement de drone bizarre, toute mise à jour imprévisible du micrologiciel, etc.

Figure 25 Itinéraire avec décollage en toute sécurité
Le point d'entrée de la grille d'arpentage
L'ajout du point de décollage a modifié le point d'entrée de la grille d'arpentage, optimisant ainsi l'ensemble de l'itinéraire (voir la figure 25). Pour modifier le point d'entrée de la grille d'arpentage, définissez un point de cheminement supplémentaire près du coin de départ souhaité (figure 26).
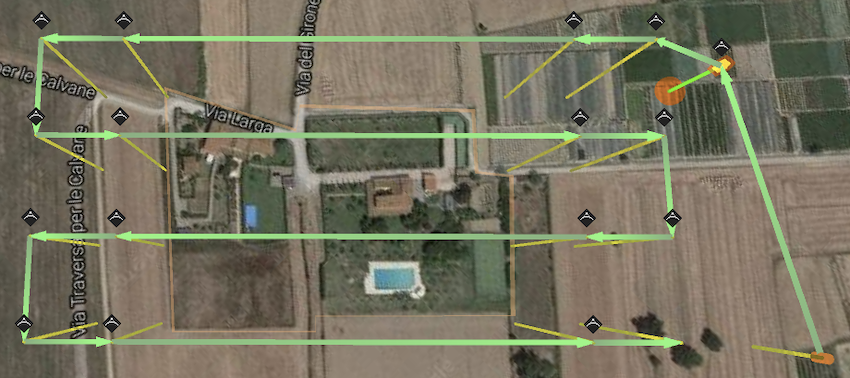
Figure 26 Modification du point d'entrée de la grille d'arpentage en ajoutant un point de cheminement
Point d'atterrissage
Si aucun point d'atterrissage n'est ajouté en dehors de la zone de photogrammétrie, alors, après la mission d'arpentage, le drone volera et survolera dans le dernier point de passage. Il y a deux options d'atterrissage : Prenez le contrôle manuel du drone et dirigez-le vers le point d'atterrissage Activez la commande Retour à la maison dans UgCS ou à partir de la télécommande (RC) Une grande zone d'enquête ou des problèmes avec la télécommande peuvent entraîner la perte du contact radio avec un drone. Dans ce cas, les scénarios suivants peuvent avoir lieu en fonction du drone et de ses paramètres :
Un drone retournera automatiquement à l'emplacement d'origine si la liaison radio avec la station au sol est perdue
Un drone volera jusqu'au dernier point de passage et survolera. Si la charge de la batterie est suffisante, alors :
Le drone effectuera un atterrissage d'urgence ou
the drone will try to fly to the home location
Il est recommandé d'ajouter un point d'atterrissage explicite à l'itinéraire pour éviter de dépendre d'un comportement ou de paramètres imprévisibles des drones. Un dernier point de passage devrait être ajouté au-dessus du point d'atterrissage prévu si le drone ne prend pas en charge l'atterrissage automatique ou si le pilote préfère l'atterrissage manuel. L'altitude du dernier point de passage doit être réglée au-dessus des obstacles dans les environs pour assurer une descente sûre et un atterrissage confortable. En général, 30 m est le meilleur choix.
Quatrième étape : déployer des points de contrôle au sol (facultatif)
Cette étape était auparavant obligatoire afin d'aligner avec précision une carte de sortie d'arpentage avec les coordonnées sur Terre. Maintenant, c'est au pilote et au client de déployer ou non des points de contrôle au sol ou d'utiliser uniquement PPK. Cependant, l'utilisation de GCP est toujours le seul moyen d'assurer l'exactitude de la carte. Agisoft Metashape, Pix4d et d'autres logiciels de traitement de données peuvent produire des cartes précises à l'aide d'images géomarquées, mais nécessitent de toute façon des points de contrôle au sol pour atteindre une véritable précision. Les points de contrôle au sol doivent être utilisés pour la sortie Survey-Grade. Pour obtenir une carte avec une précision « assez bonne », seuls les capacités du GPS RTK et du logiciel de traitement des données sont acceptables.
Étape cinq : pilotez votre mission
Dans le cas d'une mission soigneusement planifiée, cette étape est vraiment simple. L'exécution de la mission ne sera pas décrite ici, car elle peut varier en fonction du type d'UAV et d'équipement utilisé (veuillez vous référer à l'équipement et aux manuels UgCS). Notes importantes avant de prendre l'avion :
La plupart des pays ont des réglementations plus ou moins strictes en matière d'UAV, généralement disponibles sur le site Web d'une autorité aérienne locale.
IDans certains pays, une autorisation spéciale est requise pour tout type de prise de vue aérienne de photos/vidéos. Veuillez vérifier la réglementation locale (les amendes et autres conséquences peuvent être coûteuses).
Même si la planification de la mission semble être effectuée avec excellence, vérifiez-la toujours lorsque vous arrivez sur place, en tenant compte des spécificités d'une zone d'enquête particulière et des conditions de vol locales.
Étape six : traitement PPK et géolocalisation des images (facultatif)
Le géolocalisation des images est facultatif pour les drones modernes. Cela peut être fait soit automatiquement pendant le vol, soit dans UgCS après l'atterrissage du drone. Gardez à l'esprit que le traitement du PPK est suffisant dans la plupart des cas. Utilisez votre outil préféré, comme celui-ci. Cependant, seuls les points de contrôle au sol garantissent la précision souhaitée de la carte.
Étape sept : traitement des données
Pour le traitement des données, utilisez des logiciels ou des services tiers disponibles sur le marché. Pour un traitement rapide sur le terrain, UgCS Mapper est une bonne option car il fonctionne sans connexion Internet. Pour le traitement de la fidélité des vols, utilisez Pix4D Mapper, Agisoft Metashape ou d'autres outils professionnels, qui prennent en charge les générations de nuages de points denses et les GCP.
Comments